HBP Tea and Slides
Brain-inspired control systems
Jens E. Pedersen
<jeped@kth.se>
Agenda¶
... how we can train brain-inspired control systems on neuromorphic hardware
... by exploiting the growing knowledge within both neuroscience and computer science
- The NeuroComputing Systems lab at KTH
- Algorithms and brains
- Robots and brains
- What happens next?
1. The NeuroComputing Systems (NCS) lab at KTH¶

Discovering key principles by which brains work and implementing them in technical systems that intelligently interact with their environment.
Examples¶
- Analog VLSI Circuits to implement neural processing
- Sensors, such as Silicon Retinae or Cochleae
- Distributed Adaptive Control
- Massively Parallel Self-Growing Computing Architectures
- Neuro-Electronic Implants, Rehabilitation
2. Algorithms and brains¶

$\models$ Algorithms are unambiguous¶
2.4 Algorithm in the brain¶
- Modern neuroscience pinpoints specific tasks and their (partial) solutions in the brains
DAC-h3: A Proactive Robot Cognitive Architecture to Acquire and Express Knowledge About the World and the Self
3. Soft robotics and neuromorphic computing¶
3.1 Algorithms for robots¶

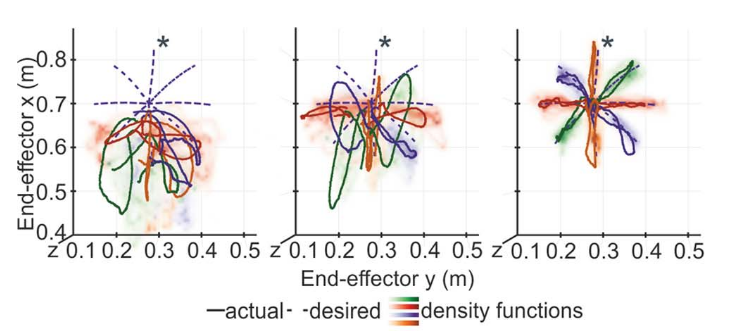
3.2 Brain-inspired controller for the Baxter robot¶
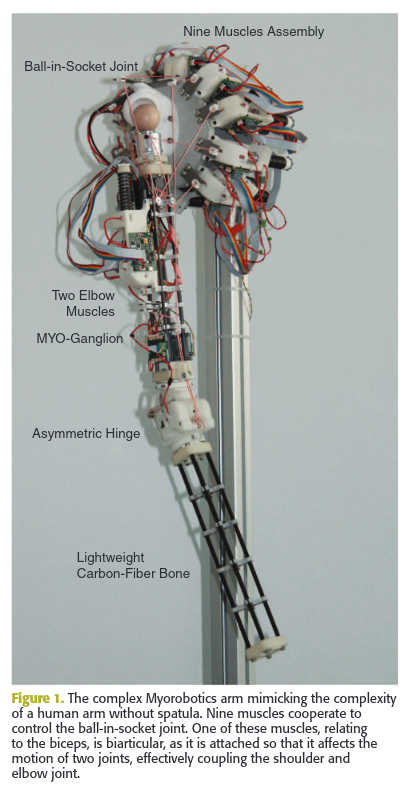
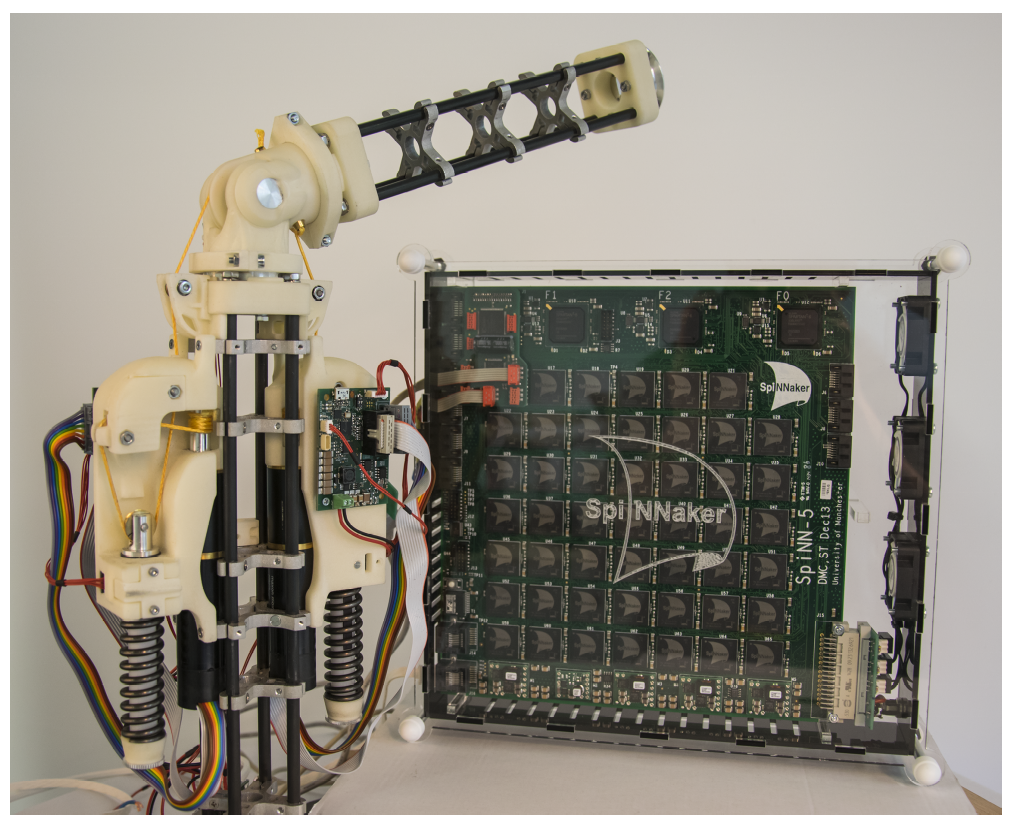
3.3 Myorobotic arm¶
4. What's next? Integrating neuroscience and neurorobotics¶
- Energy-efficient, scalable algorithms and hardware
- to implement neuronal algorithms in real-time
- to interpret (neuronal) sensory input in real-time
- Event-based sensors
- Dynamic vision systems (DVS)
- Neuro-prosthetics
- Neuronal recordings (EMG / EEG) to create motor signals in real-time
- Robotic interaction within their environment
HBP WP3: Adaptive networks for cognitive architectures: from advanced learning to neurorobotics and neuromorphic applications¶
WPO3.1: Enhanced real-world task performance through biologically plausible adaptive cognitive architectures running on neuromorphic hardware and closed-loop neuro-robotics platform
HBP Tea and Slides
Brain-inspired control systems
Jens E. Pedersen
<jeped@kth.se>
Credits