
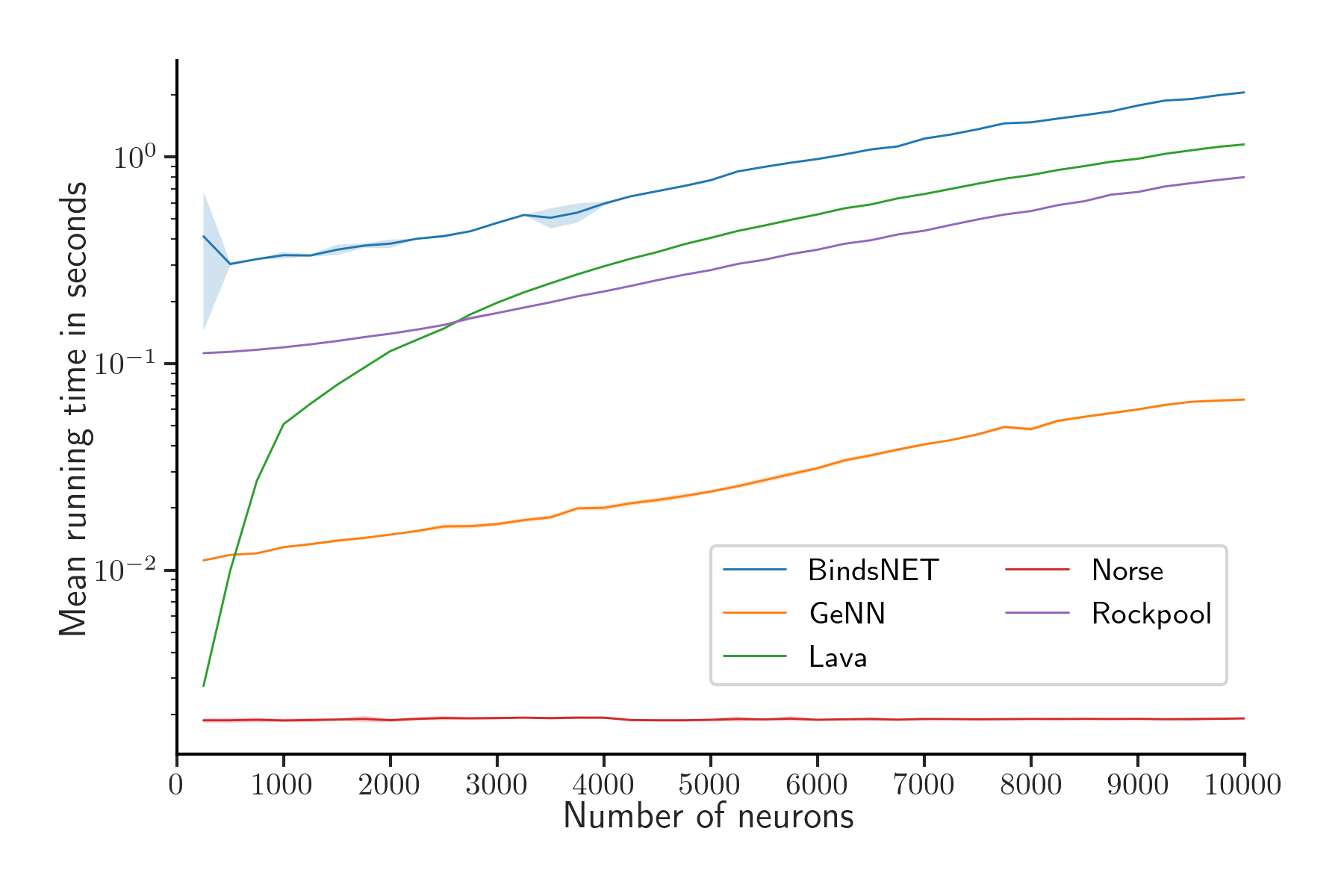
Real-time neuromorphics with Norse
Jens Egholm Pedersen
- <jeped@kth.se>
- @jensegholm
- https://neurocomputing.systems

| 5' | Numerical acceleration of biological simulations | |
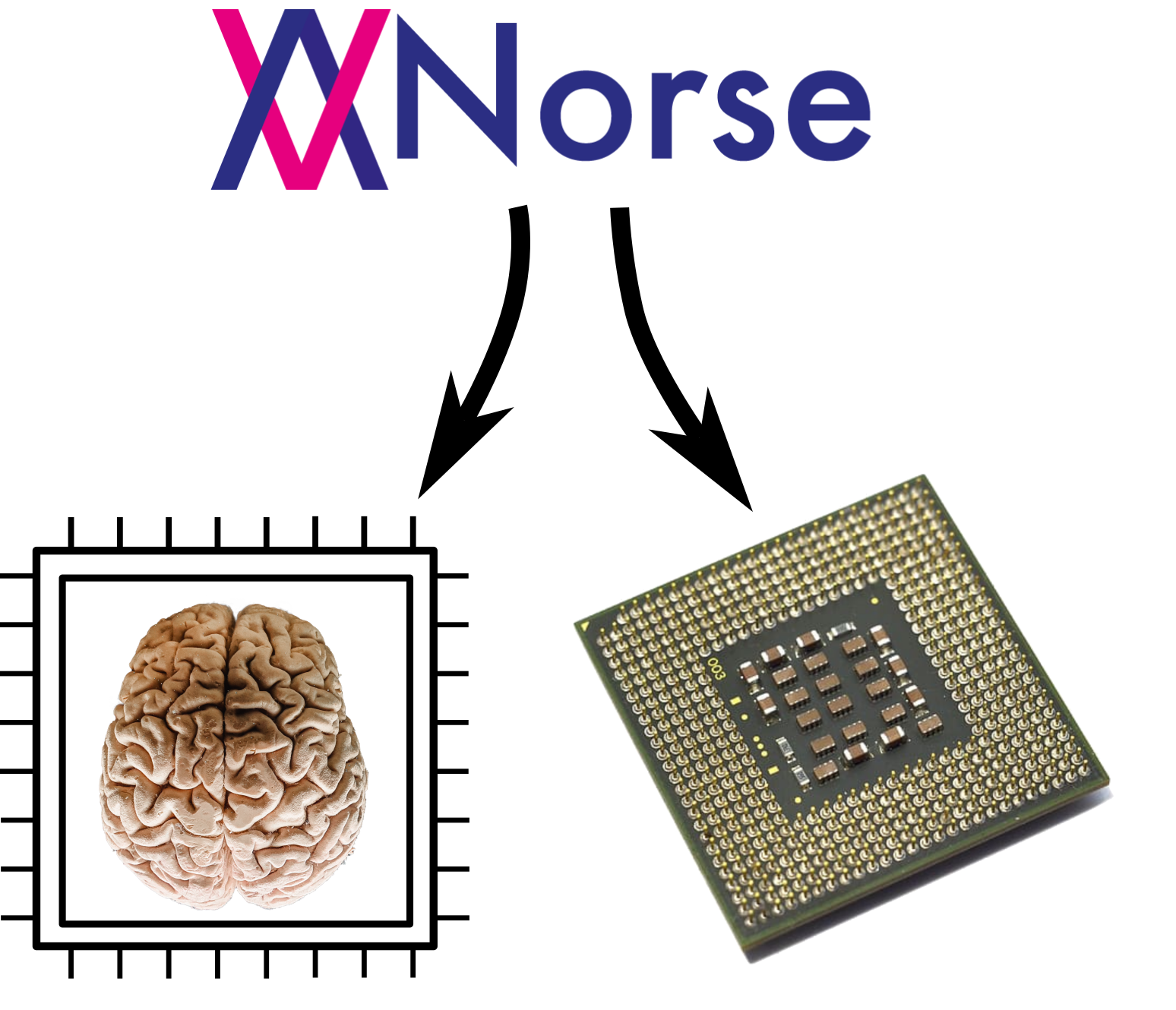
| 10' | Neuromorphic engineering with Norse | |
| 30' | Demonstration of real-time applications
Event-based camera processing
Closed-loop control systems | |

Math: $\dot{v} = \tau_{mem}(v_{leak} - v + i)$
Python: delta_v = tau * (v_leak - old_v + i)
import torch
import norse.torch as snn
import norse.torch as snn snn.LICell()
snn.LICell()
LICell(p=LIParameters(tau_syn_inv=tensor(200.), tau_mem_inv=tensor(100.), v_leak=tensor(0.)), dt=0.001)
snn.LIFCell()
Norse is built on PyTorch who works with tensors.
torch.tensor([0])
tensor([0])
torch.tensor([0])
data = torch.ones(10)
torch.zeros(2, 2)
tensor([[0., 0.],
[0., 0.]])
1torch.ones(8)
tensor([1., 1., 1., 1., 1., 1., 1., 1.])
data = torch.ones(10)
Could be anything: vectors, matrices (cameras), high-dimensional data such as EEG recordings, etc.
We can check the shape with .shape
We can now take our data (tensor) and apply it to our model (neuron dynamics).
data = torch.ones(1)
model = snn.LICell()
model(data)
(tensor([0.], grad_fn=<AddBackward0>), LIState(v=tensor([0.], grad_fn=<AddBackward0>), i=tensor([1.])))
snn.LIFCell()(torch.ones(1))
output, state =model(data)
state
LIState(v=tensor([0.], grad_fn=<AddBackward0>), i=tensor([1.]))
output_values, output_state = snn.LICell()(data)
snn.LIFCell()(torch.ones(1))
(tensor([0.], grad_fn=<CppNode<SuperFunction>>), LIFFeedForwardState(v=tensor([0.], grad_fn=<AddBackward0>), i=tensor([1.])))
snn.LIFCell()(data)
model = snn.LIFCell()
data = torch.ones(1)
state = None
for t in range(100):
output, state = model(data, state)
print(output)
tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([0.], grad_fn=<CppNode<SuperFunction>>) tensor([1.], grad_fn=<CppNode<SuperFunction>>)
model
state = None
data = torch.tensor(1)
state = None
for t in range(100):
model
Assuming time-series data, we can simulate it all at once.
data = torch.ones(100, 1)
snn.LIF()(data)
(tensor([[0.],
[0.],
[0.],
[0.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.],
[0.],
[0.],
[1.]], grad_fn=<StackBackward0>),
LIFFeedForwardState(v=tensor([0.], grad_fn=<AddBackward0>), i=tensor([5.0000])))
data
model = snn.LIF()
output, state = model(data)
output```
Note the difference between LIFCell (without time) and LIF.
PyTorch convention.
Our models have so far been running on the CPU - but it is simple to put them on the GPU.
model = snn.SequentialState(
snn.Lift(torch.nn.Conv2d(1, 3, 5, padding=2)),
snn.LIF(),
torch.nn.Flatten(1),
torch.nn.Linear(30000, 10),
torch.nn.Sigmoid()
)
data = torch.ones(100, 1, 1, 100, 100)
model = snn.SequentialState(
snn.Lift(torch.nn.Conv2d(1, 3, 5, padding=2)),
snn.LIF(),
torch.nn.Flatten(1),
torch.nn.Linear(30000, 10),
torch.nn.Sigmoid()
)
data = torch.ones(100, 1, 1, 100, 100)
model = snn.SequentialState(
snn.Lift(torch.nn.Conv2d(1, 3, 5, padding=2)),
snn.LIF(),
torch.nn.Flatten(1),
torch.nn.Linear(30000, 10),
torch.nn.Sigmoid()
).cuda()
data = torch.ones(100, 1, 1, 100, 100).cuda()
%timeit model(data)
15.4 ms ± 23.5 µs per loop (mean ± std. dev. of 7 runs, 1 loop each)
%timeit model(torch.ones(100, 1, 1, 100, 100))
model = model.cpu()
data = data.cpu()
%timeit model(data)
36 ms ± 2.28 ms per loop (mean ± std. dev. of 7 runs, 10 loops each)
model = model.cuda() data = data.cuda()
%timeit model(data)
Neuromorphic sensing is fundamentally different because they operate with sparse data.
Event-based cameras detect luminosity changes over time.
 (Source: Wikipedia)
(Source: Wikipedia)
Sparse: event-based - only when an event occurs => fast and low processing
Frameless: high time resolution
Other benefits: high dynamic range, low energy consumption, etc.
We need an efficient tool: event cameras emit millions of events per second.
Aestream - address-event streaming library: https://github.com/norse/aestream
import aestream
with aestream.DVSInput((640, 480)) as dvs:
dvs.read() # Gives us a tensor
By convolving our input signal with an edge detection kernel, we can single out oriented edges:
import matplotlib.pyplot as plt
kernel = (torch.linspace(-10, 10, 10).sigmoid().diff() - 0.14).repeat(9, 1)
field
kernel = field.repeat(9, 1)
plt.imshow(kernel)```
kernels = torch.stack([kernel, kernel.T])
convolution = torch.nn.Conv2d(1, 2, 9)
convolution.weight = torch.nn.Parameter(kernels)
kernels
convolution = torch.nn.Conv2d(1, 2, 9)
convolution = torch.nn.Parameter(kernels)```
How do we remove noise?

(Source: Wikipedia)
Can we use the refractory period?
noise_filter = snn.LIFRefracCell()
noise_filter = snn.LIFRefracCell()
model = snn.SequentialState(
noise_filter,
convolution
)
model
noise_filter,
convolution
)```
state = None
with aestream.DVSInput((640, 480)) as dvs:
data = dvs.read()
output, state = model(data, state)
model = snn.SequentialState(
noise_filter,
convolution
)
with aestream.DVSInput((640, 480)) as dvs:
# Read the data
data = dvs.read()
# Run the model (with the previous state)
output, state = model(data, state)
%%html
<div align="middle">
<video width="80%" controls autoplay loop>
<source src="2209-edge-detection.mp4" type="video/mp4">
</video></div>
Full code is available online: https://github.com/norse/aestream
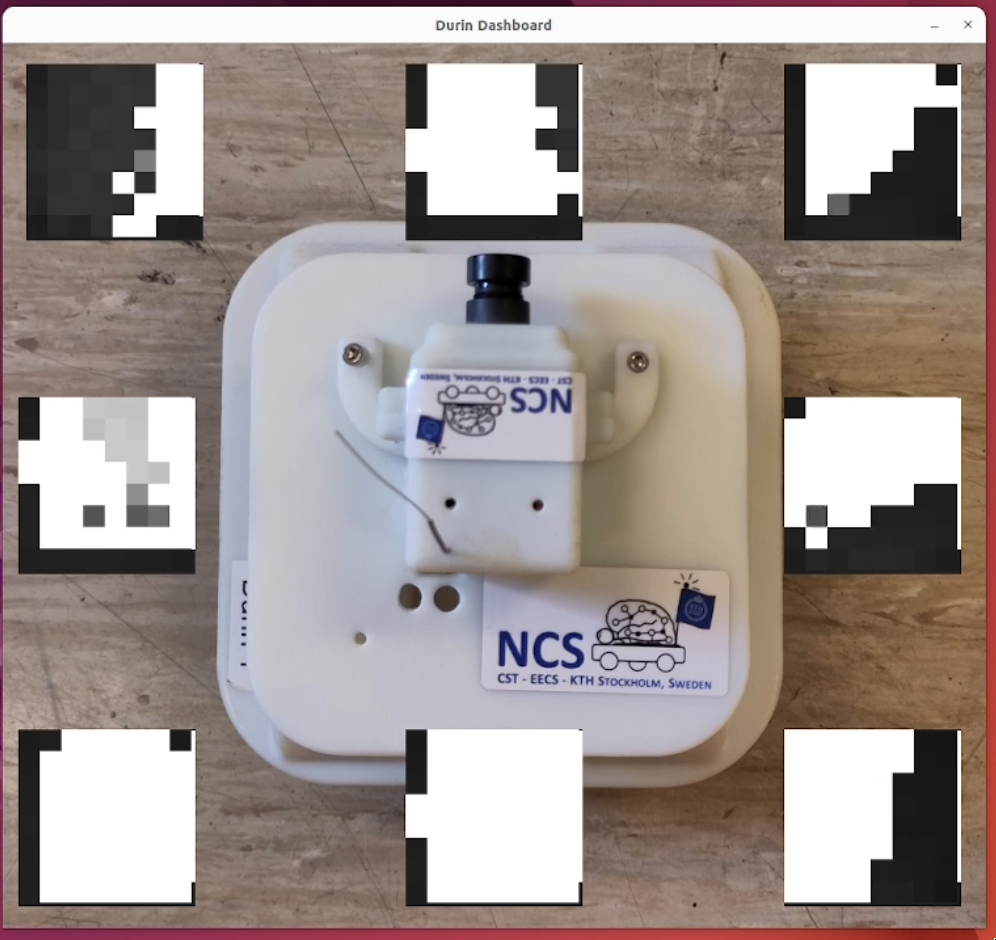
https://github.com/ncskth/durin

Durin has 8 Time-of-Flight sensors, in an 8x8 array:
from durin import DurinUI
with DurinUI("durin5.local") as durin:
(obs, dvs, cmd) = durin.read()
obs.tof # Tof sensor data
left = obs.tof[1, 3, 3]
right = obs.tof[6, 3, 3]
data = torch.tensor([left, right])
p = snn.LIParameters(tau_mem_inv=100)
network = snn.LICell(p)
p = snn.LIParameters(tau_mem_inv=100)
network = snn.LICell(p)
state = None
output, state = network(data, state)
left, right = output
command = MoveWheels(left, right, right, left)
durin(command)
# Update the network with the input and read the output
output, network_state = network(input_tensor, network_state)
left, right = output # Unpack
# NE NW SW SE
command = MoveWheels(left, right, right, left)
durin(command) # Send the command to Durin
from durin import DurinUI
with DurinUI("durin5.local") as durin:
# Extract tof sensor data
(obs, dvs, cmd) = durin.read()
left = obs.tof[1, 3, 3]
right = obs.tof[6, 3, 3]
data = torch.tensor([left, right])
# Update the network with the input and read the output
output, network_state = network(data, network_state)
left, right = output # Separate left and right outputs
command = MoveWheels(left, right, right, left)
durin(command) # Send the command to Durin
%%html
<div align="middle">
<video width="80%" controls autoplay loop>
<source src="2209-durin-braitenberg.mp4" type="video/mp4">
</video></div>
Full example available here: https://github.com/ncskth/durin/
Work is ongoing to run Norse models on
Thank you!





{kind=link}